4WS – cztery koła skrętne. Historia i działanie japońskiego wynalazku
Konstruktorzy od dawna zastanawiali się nad poprawą parametrów trakcyjnych samochodów. Ponieważ mechanizm skrętu kół był zarezerwowany dla osi przedniej, właśnie w przeniesieniu skrętu kierownicy na skręt kół pokładano największe nadzieje. Czy wszystkie koła skrętne są rzeczywiście potrzebne w samochodzie? Jakie korzyści daje to rozwiązanie i jak jest realizowane od strony technicznej?
17.02.2012 | aktual.: 30.03.2023 12:15
Zalogowani mogą więcej
Możesz zapisać ten artykuł na później. Znajdziesz go potem na swoim koncie użytkownika

Początki koncepcji skrętu także kół osi tylnej sięgają początku lat 20. ubiegłego wieku. Wtedy to pierwsze rozwiązania były stosowane w ciężarówkach. Do koncepcji powrócono w latach 30. za sprawą koncepcji napędu na cztery koła. Jednymi z pierwszych pojazdów były amerykańskie Nash Quad, w którym mechanizm włączany był czasowo przy dużym skręcie kół podczas manewrowania.
Warto wspomnieć o wojskowym Mercedesie 170VL z napędem 4x4 i z możliwością skrętu także tylnych kół poprzez zastosowanie mechanicznego systemu dźwigienek i drążków. Skręt przeciwny do skrętu kół przednich pozwolił znacznie zmniejszyć promień zawracania. Powodowało to jednak znaczną niestabilność podczas jazdy z większymi prędkościami.

Pomysł użycia podobnego systemu w autach osobowych powstał jako odpowiedź na projekt ESV (Experimental Safety Vehicle) z początku lat 70. Jedną z jego idei było zwiększenie bezpieczeństwa czynnego, a co za tym idzie - parametrów trakcyjnych samochodu. Do projektu przystąpiło 7 krajów, w tym Japonia.
Inżynierowie Hondy przeprowadzili serię eksperymentów, z których wynikało, że korzystniejszy byłby skręt kół obu osi w tym samym kierunku. Oznaczało to jednak małą zwrotność. Dlatego zdecydowano się połączyć oba rozwiązania i w 1978 roku opatentowano system 4WS.
Zgodnie z zasadą, że pojazd idealny powinien być nadsterowny przy małych prędkościach i lekko podsterowny przy większych, powiązano rodzaj skrętu tylnych kół z prędkością jazdy. W roku 1981 opracowano pierwszy prototyp składający się z dwóch połączonych przodów Hondy Accord. Prototyp ten posiadał dwa połączone układy kierownicze standardowego modelu Accord.

Przy prędkościach poniżej 40 km/h i kącie obrotu kierownicy powyżej 240 stopni następował skręt kół tylnych przeciwnie do skrętu przednich. To powodowało ruch dookoła chwilowego środka obrotu. Koła tylne mogły skręcać się aż o 5 stopni, przy 35-stopniowym skręcie ich przednich odpowiedników.

Przy większych prędkościach i skręcie kierownicy mniejszym niż 240 stopni koła tylne skręcały się w tym samym kierunku co przednie. Skręt tylnych był dziesięciokrotnie mniejszy niż przednich.
1991 Honda Prelude Si 4WS 5-speed
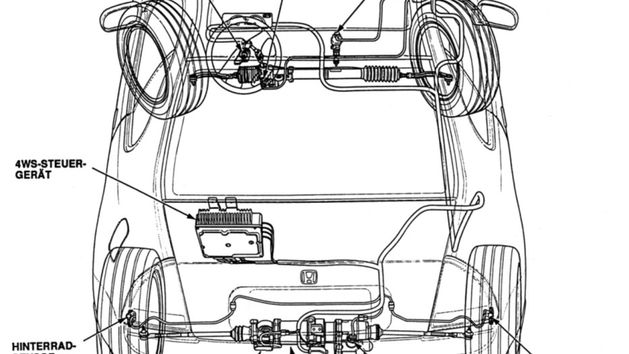
Całość była realizowana całkowicie mechanicznie. Układ składał się z przedniego mechanizmu kierowniczego, wału pośredniego, tylnego mechanizmu kierowniczego. Ten ostatni zbudowany był z przekładni planetarnej i układu mimośrodowego. System 4WS zadebiutował w Hondzie Prelude trzeciej generacji podczas targów w Genewie w 1987 roku.

Rozwiązaniem zainteresowały się również inne japońskie marki. Mazda i Nissan opracowały własne wersje układów. Mazda zaprezentowała swój pomysł w koncepcyjnej wersji MX3. Było to rozwinięcie koncepcji czterech kół skrętnych z 1983 roku. W odróżnieniu od projektu Hondy ten był nie tylko układem mechanicznym, ale zawierał też elementy hydrauliczne i elektroniczne.
Auto miało czujniki prędkości i skrętu kół i w zależności od tego następowało odpowiednie sterowanie zaworów siłowników hydraulicznych odpowiedzialnych za skręt kół tylnych. Takie rozwiązanie wdrożono także w autach MX-6 GT z 1990 roku oraz MX6 z 1991 i w modelu 929.

W odpowiedzi na takie rozwinięcie systemu 4WS Honda zastosowała elektronikę także w czwartej generacji modelu Prelude z 1991 roku oraz w piątej generacji z roku 1997.
Honda Prelude VTi 2.2 VTEC DOHC 4WS (4 Wheel Steering)
Podobna do koncepcji Mazdy była także koncepcja Nissana. W sportowych modelach 300ZX oraz w kultowym już Skyline GTR użyto układu, który stanowił rozwinięcie podatnego zawieszenia niezależnego kół tylnych. Dodano tylko urządzenie, które pozwalało dodatkowo skręcać tylne koła do 7 stopni. Układ składał się z drążka łączącego koła tylne i siłownika hydraulicznego.

Powszechność stosowania systemu ESP spowodowała nowe podejście do tematu i opracowanie przez koncern GM układu Quadrasteer. Celem jego użycia było poprawienie zdolności manewrowania oraz zwiększenie bezpieczeństwa jazdy. W tylnej osi pojawił się układ kierowniczy, dokładnie taki sam jak na osi przedniej. Układ wspomagany był elektrycznie. Elektronika sterowała silniczkiem tylnej przekładni kierowniczej. Dużą zaletą systemu była jego prostota.

Użycie systemów 4WS było podyktowane chęcią zwiększenia zwrotności samochodu, ale także zwiększeniem stabilności podczas nagłych manewrów przy większej prędkości. Było to szczególnie istotne w czasach, gdy nikt nie słyszał jeszcze o systemie ESP.
Wykorzystywanie takich rozwiązań często okazywało się kłopotliwe w eksploatacji i kosztowne w przypadku napraw. Ponadto niewielkie kąty skrętu tylnych kół ograniczały jego przydatność podczas jazdy. Japońscy producenci stopniowo wycofali się z tego rozwiązania. Przykładowo, w Hondzie 4WS przestano stosować wraz z końcem produkcji modelu Prelude piątej generacji.
Duży w tym udział miał sceptycyzm klientów, którzy mimo intensywnych kampanii reklamowych nie widzieli korzyści z posiadania takiego systemu. Wyrażano raczej obawy związane z bezpieczeństwem i niezawodnością. Ponieważ liczba sprzedanych egzemplarzy nie była imponująca, dziś uważane są za prawdziwe klasyki. Ich ceny są zdecydowanie wyższe niż podstawowych odmian.

Przez ostatnie lata producenci przestali wykorzystywać możliwości takiego rozwiązania. Przełomem w tej kwestii jest system typu - 4control stosowany w obecnej generacji Renault Laguna w modelu GT. Z założenia, oprócz utrzymania zalet poprzedników, celem konstruktorów 4WS było także zwiększenie precyzji prowadzenia.

W Lagunie GT tylne koła skręcają się w przeciwnym do przednich kierunku aż do prędkości 60 km/h. Maksymalny kąt skrętu to 3,5 stopnia dla przeciwnego kierunku i 2 stopnie dla zgodnego ze skrętem kół przednich. Dzięki temu średnica zawracania nawet w wersji kombi jest porównywalna z modelem Clio (około 10,8m).
Zastosowanie układu zmniejsza także potrzebny kąt skręcenia kierownicy. Do skrętu kół o 1 stopień bez układu należy skręcić kierownicę o 16, a z układem tylko o 13,5 lub nawet 12 stopni (gdy koła skręcają się w przeciwnym kierunku). Pozwala to poprawić szybkość reakcji i zwiększa precyzję układu kierowniczego.
Renault Laguna GT met 4WS (Four Wheel Steering)
Warto zauważyć, że w Lagunie GT potrzebna była także korekta działania systemu ESP. Dzięki zastosowaniu układu można go wykorzystać do reakcji w sytuacjach zagrożenia. Moduł systemu rozpoznaje sytuację, kiedy auto hamuje z różną przyczepnością kół. Odpowiednie dostosowywanie przez elektronikę skrętu tylnych kół utrzymuje obrany przez kierowcę tor jazdy. Kierowca nie jest tego świadomy, ponieważ odbywa się to bez reakcji koła kierownicy.

Ponadto system ESP skalibrowano na znacznie późniejsze działanie niż w innych odmianach modelu Laguna. Rozwiązanie jest bardzo przydatne i znacznie zwiększa parametry trakcyjne, występuje także w innych wersjach Laguny. Podczas porównywalnej jazdy po torze widać wyraźnie redukcję podsterowności przy małych prędkościach i nadsterowności przy większych. Auto wyposażone w system uzyskuje znacznie lepszy czas okrążenia niż jego odpowiednik bez systemu.











